 |
| The objective of LinuxPCRobot.org is to build a fully functional robotic development platform for $500 or less using linux, commonly available components, a little skill, and some good old fashioned scrounging. |
Pictures, February 2011
Submitted by mohawk software on Fri, 2011-02-11 16:01
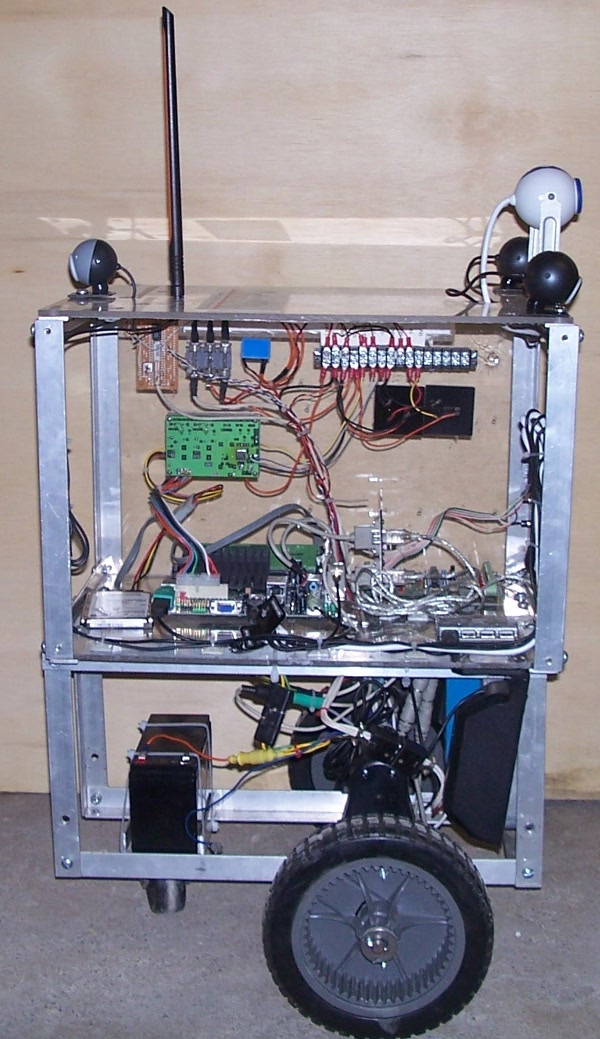 |
| This is the right side of the robot. |
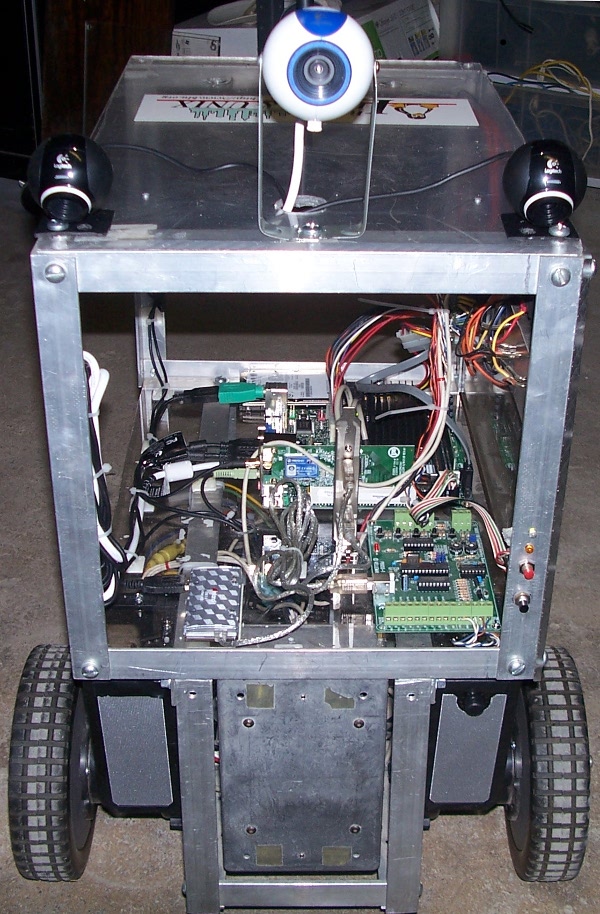 |
| Here is the front of the robot. The Box at the base is the motor amplifier. Note the 3 cameras. The middle camera is intended for navigation. The left and right camera pointing down are intended for object avoidance. |
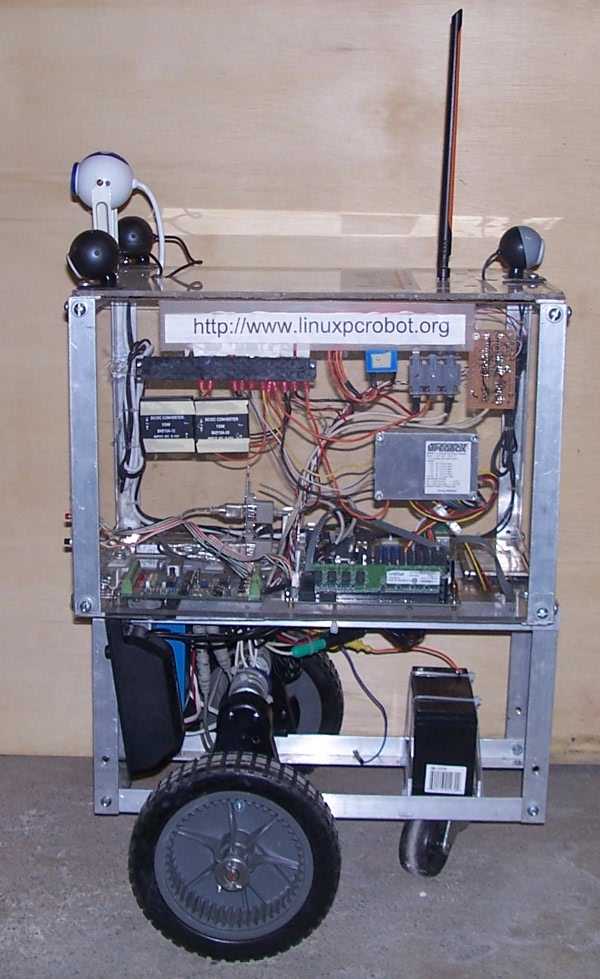 |
| This is the left side, the sliver box mounted on the right side of the panel is an ATX DC/DC converter. The two black boxes to the left that seem to be mounted with double-sided tape (because they are) are two DC/DC converters, a 12volt and 5volt. They replace two older units. |
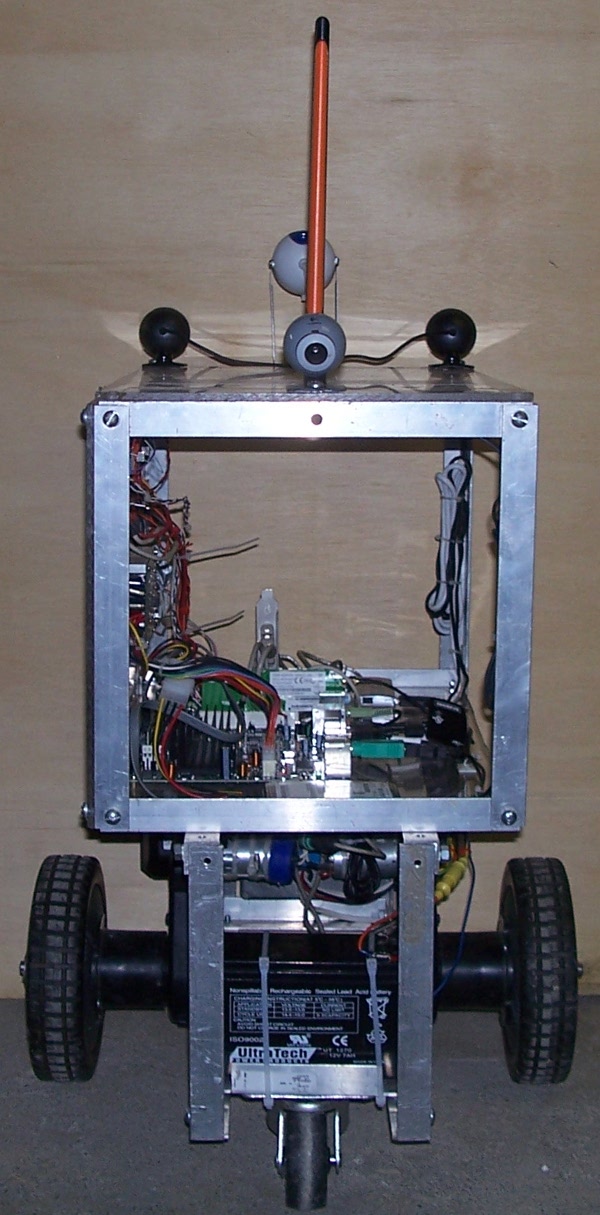 |
| This is the back, note the single camera. This is intended for navigation and object avoidance when backing up. |
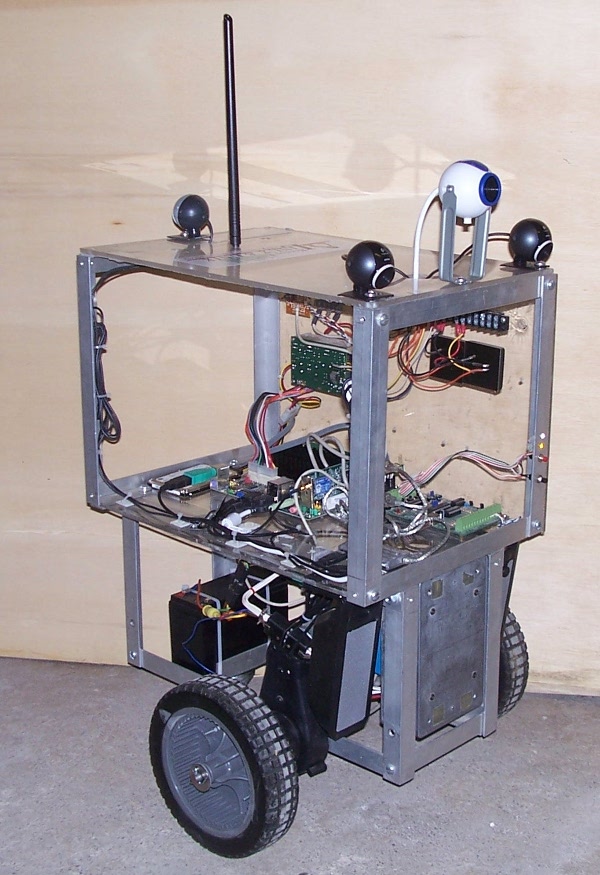 |
| Here is another front view, the two push buttons on the right side are standard AXT power and reset. The two LEDs are hard disk and power |
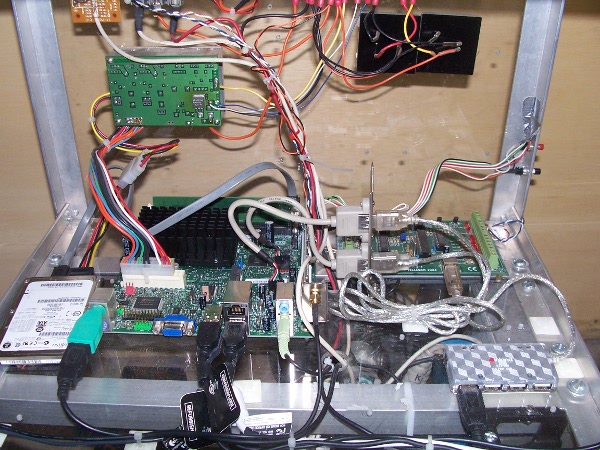 |
| Here is a closeup of the system tray. The board on the left is an Intel D510M0 Atom Motherboard. The board to the right is a Velleman K8055 USB I/O Card. |